Let’s get familiar with Drones:
Unmanned aerial vehicles (UAVs), commonly known as drones, are powered aerial vehicles that do not carry a human operator and can fly autonomously or be piloted remotely.
- UAVs can be fully or partially autonomous and carry a lethal or nonlethal payload.
- They are used in various sectors, including military, transportation, logistics, construction, environmental monitoring, and real estate photography.
- UAVs can be remarkably efficient, offering substantially greater range and endurance than equivalent manned systems.
- UAVs are descended from target drones and remotely piloted vehicles (RPVs) employed by the military.
Classification of drones based on the number of wings:
Drones can be classified based on the number of wings they possess. Here are the main types of drones based on their number of wings:
- Single-rotor drones: These drones have a single main rotor for lift and are more energy-efficient than multi-rotor drones. They are suitable for long-endurance missions but may be less stable than multi-rotor drones.
- Multi-rotor drones: These are the most common type of drones, featuring multiple rotors to provide lift and stability. They are used for various purposes, such as aerial mapping and surveying, aerial surveillance and patrol, and search and rescue operations. They are also known as Quadcopters.
- Fixed-wing drones: Similar to traditional aircraft, fixed-wing drones rely on wings for lift rather than rotors. They are typically large, fuel-powered models used by the military and require a runway to operate. Fixed-wing drones are energy-efficient and cover longer ranges than rotary-wing drones.

Application Areas of Drones/quadcopters:
Quadcopter drones have a wide range of applications in various fields. Some of the major application areas of quadcopter drones include:
- Aerial photography for journalism and film, express shipping and delivery.
- Gathering information or supplying essentials for disaster management.
- Thermal sensor drones for search and rescue operations.
- Border control surveillance.
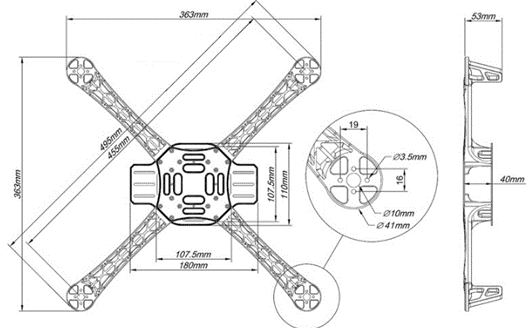
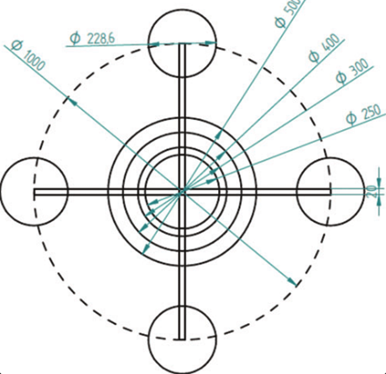
Dimensions of a Quadcopter Drone:
Quadcopter drones can have different dimensions depending on their size and purpose. The dimensions of a quadcopter drone can be measured in millimeters and can vary based on the size of the spherical body, cylindrical arms, and propellers. The size of the quadcopter drone can also be measured by its wheelbase, which is the diagonal distance between the motors and is typically measured in millimeters. The wheelbase of a quadcopter drone can range from less than 100mm to over 280mm, with thicker frames typically being more durable. The size of the quadcopter drone can also determine the size of the propellers and motors that can be used with it, with larger drones being able to accommodate larger and more powerful components.
Flight control dynamics of a Quadcopter:
The flight control dynamics of a quadcopter can be explained through the movement of the drone in the forward, backward, upward, and downward directions based on the thrust applied to its wings. Here’s a brief explanation of how thrust affects the drone’s motion in these directions:
- Forward motion: The forward motion of a quadcopter is achieved by adjusting the rotor speeds and/or propeller tilting to increase the thrust in the forward direction. The propellers push air downward and forward, creating a forward thrust that allows the drone to move forward
- Backward motion: To move the quadcopter backward, the rotors can be adjusted to generate thrust in the opposite direction. This can be achieved by changing the rotor speeds or propeller tilting, depending on the specific design of the quadcopter
- Upward motion: The upward motion of a quadcopter is achieved by increasing the thrust generated by the propellers. This can be done by accelerating the rotors, increasing their speed, or adjusting the propeller tilting to generate more lift
- Downward motion: To move the quadcopter downward, the thrust generated by the propellers can be redirected downward. This can be achieved by adjusting the rotor speeds, propeller tilting, or adding downward-directed thrust components to the overall thrust vector.
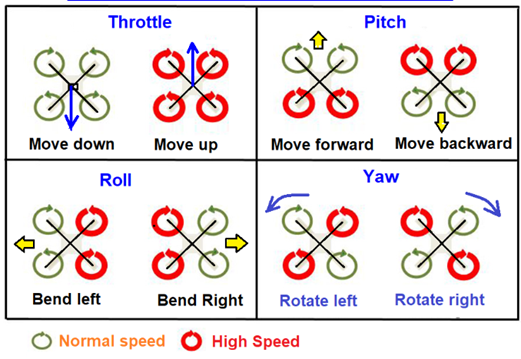
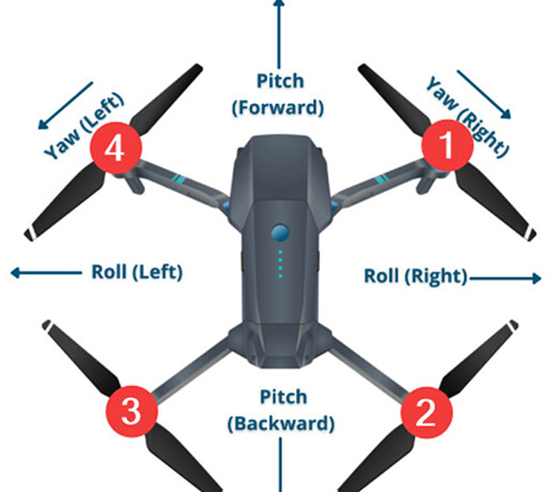
Factors and Parameters Affecting Flight Control Dynamics of a Quadcopter:
In the context of quadcopter drones, thrust, yaw, pitch, and roll are essential concepts that help understand the flight dynamics and control of the drone.
- Thrust: Thrust is the force generated by the propellers that pushes the drone upward and forward. In a quadcopter, there are four propellers, each generating thrust in the direction of the positive z-axis in the body frame.
- Yaw: Yaw refers to the rotation of the drone about its axis, which is responsible for the drone’s orientation and heading in the horizontal plane.
- Pitch: Pitch refers to the angle between the drone’s body and its horizontal plane, which affects the drone’s altitude and angle of attack.
- Roll: Roll refers to the angle between the drone’s body and its vertical axis, which affects the drone’s side-to-side stability and balance.
- Torque: Torque is the rotating or twisting force exerted by the propellers on the drone’s body and the propellers themselves.
In a quadcopter, the propellers exert a torque on the drone’s body in the direction opposite to their rotation. This torque can cause the drone to spin or change its orientation in response to the propeller’s force. It is essential to maintain a balance between the torque generated by the propellers to avoid uncontrolled spinning or instability in the drone’s flight. Roll control is crucial for maintaining stability during flight, especially when the drone is carrying a payload or operating in complex environments. Roll control is typically achieved by adjusting the rotor speeds and/or propeller tilting. Pitch is essential for the drone to maintain a stable flight path and avoid obstacles. Pitch control is achieved by adjusting the rotor speeds and/or propeller tilting. Yaw is essential for the drone to navigate and maintain its desired flight path or orientation. Differential thrust between the two pairs of counter-rotating motors provides yaw torque. The sum of the four thrusts results in the total thrust of the drone. Thrust is crucial for the drone to maintain altitude and speed in various flight conditions.
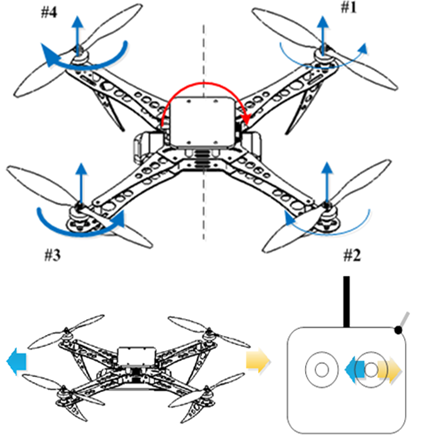
The architecture of a Basic Quadcopter:
The different types of elements comprised in a quadcopter include:
- Frame: The frame is the main structure of the quadcopter that holds all the other components together. It can be made of various materials such as aluminum, carbon fiber, plastic, glass fiber, or PCB fiber.
- Motors: The motors are responsible for generating the thrust needed for flight. A quadcopter has four motors, one for each rotor.
- Electronic Speed Controllers (ESCs): The ESCs control the speed of the motors and ensure that they are synchronized with each other.
- Propellers: The propellers are attached to the motors and generate the lift needed for flight. A quadcopter has four propellers, one for each rotor.
- Battery: The battery provides power to the motors and other electronic components of the quadcopter.
- Flight Controller: The flight controller is the brain of the quadcopter and controls its flight. It receives input from the pilot or autopilot system and adjusts the speed of the motors to maintain stability and control.
- Radio Transmitter/Receiver: The radio transmitter sends commands from the pilot to the quadcopter, while the receiver receives these commands and sends them to the flight controller.
- FPV Camera: An FPV (First Person View) camera allows the pilot to see what the quadcopter sees in real time.
- Video Transmitter (VTX): The VTX sends the video signal from the FPV camera to the pilot’s receiver.
- Antenna: The antenna is used to transmit and receive radio signals between the quadcopter and the pilot’s transmitter.
- Gimbal: A gimbal is a device that stabilizes the camera and reduces vibrations during flight.
- LEDs: LEDs can provide visual feedback on the status of the quadcopter, such as battery level or flight mode.
Majorly selling Quadcopter in the US region:
One famous quadcopter selling in the USA is the DJI Phantom series, which is a popular choice for both professional and amateur drone pilots. The Phantom series is known for its stability, ease of use, and high-quality camera systems, making it a top choice for capturing stunning aerial photos and videos.
The controller architecture for the DJI Phantom series typically includes a remote controller that connects to the drone via radio frequency. The remote controller is responsible for controlling the drone’s flight, adjusting its camera settings, and accessing various flight features. The controller’s design is ergonomic and user-friendly, providing a comfortable and immersive flying experience.

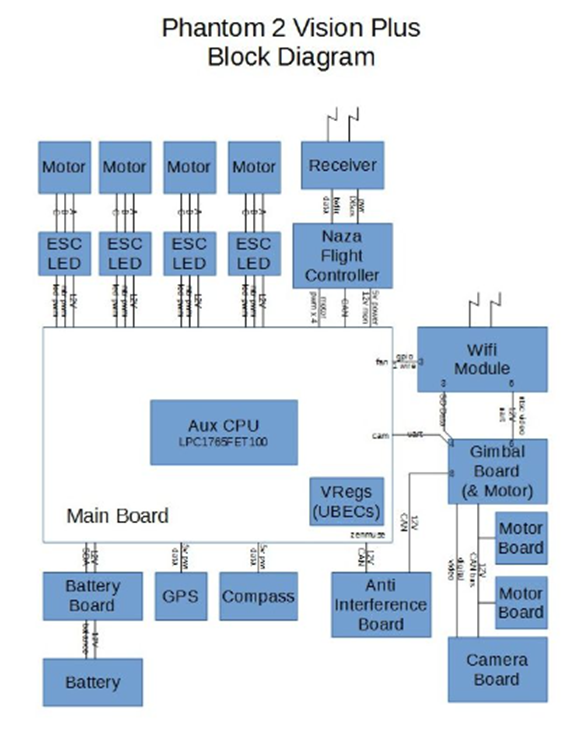
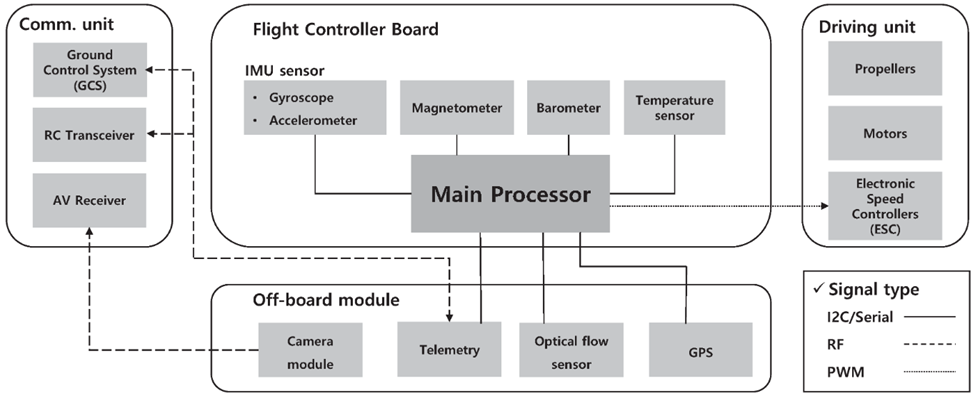
Signal Flow in a Drone:
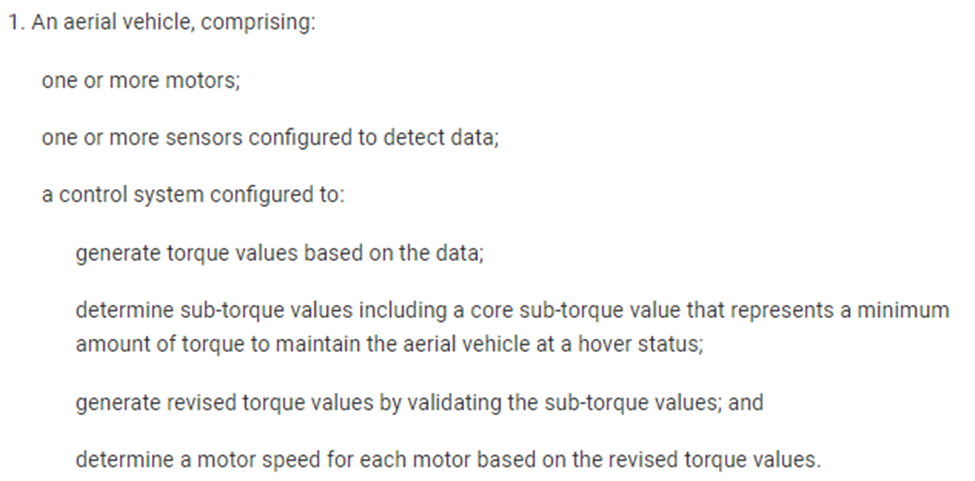
Granted invention related to working of Drone:
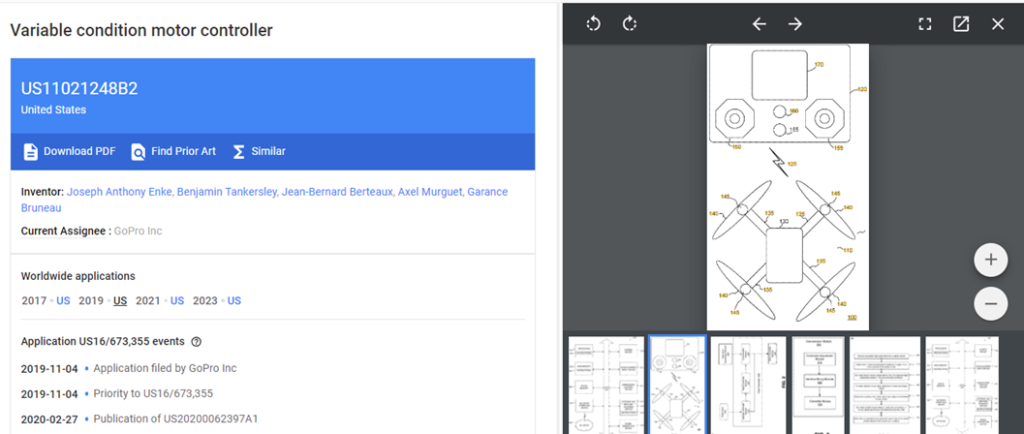
The claim of the invention: